本案例是西门子1200PLC通过Profinet转Modbus TCP网关连接搬运机器人配置案例,所需设备为西门子1200PLC,耐用通信技术Profinet转ModbusTCP网关,搬运机器人。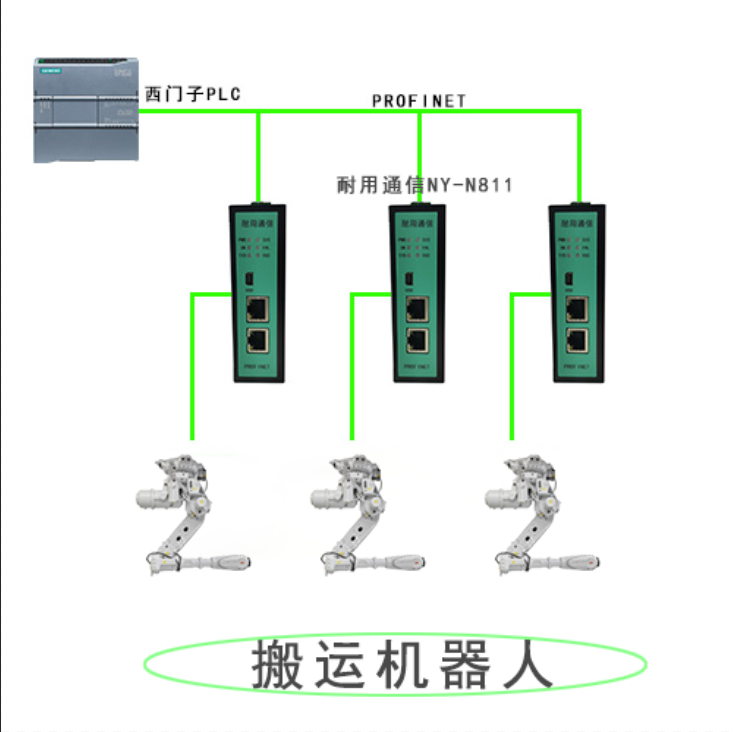
1、配置过程:首先打开西门子博图配置软件,添加PLC具体型号;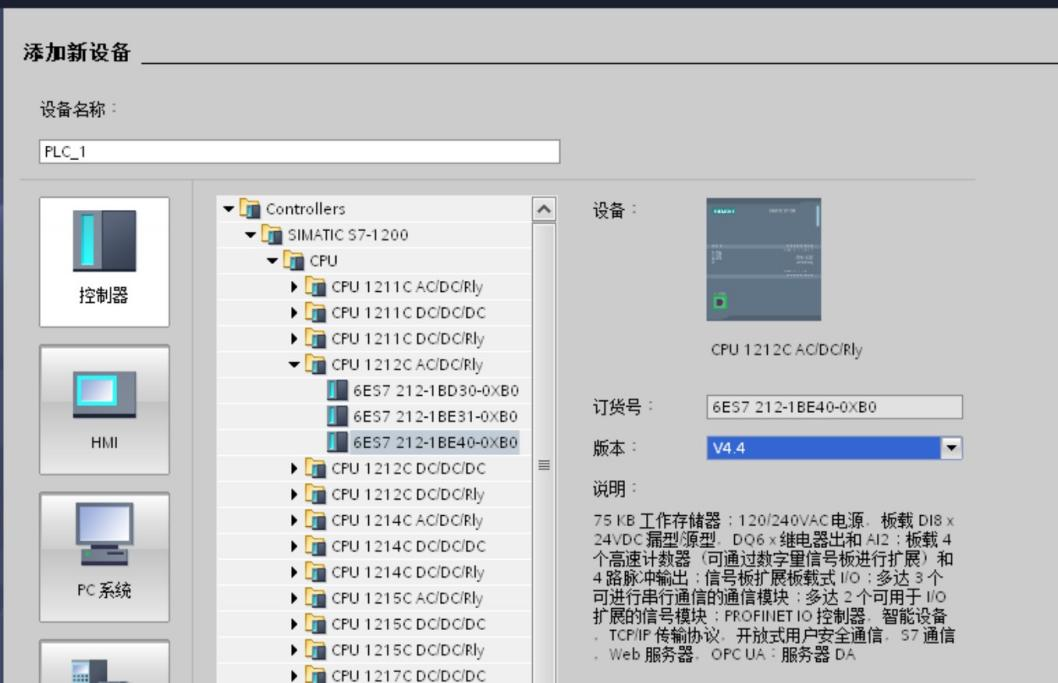
2、导入Profinet转Modbus TCP网关的GSD文件;
3、安装GSD后选择相对应模块;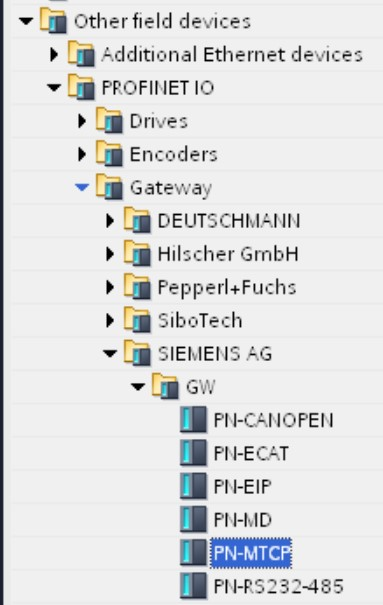
4、设置Profinet转Modbus TCP网关IP及设备名称(本例名称为PN1设备IP为192.168.20.10);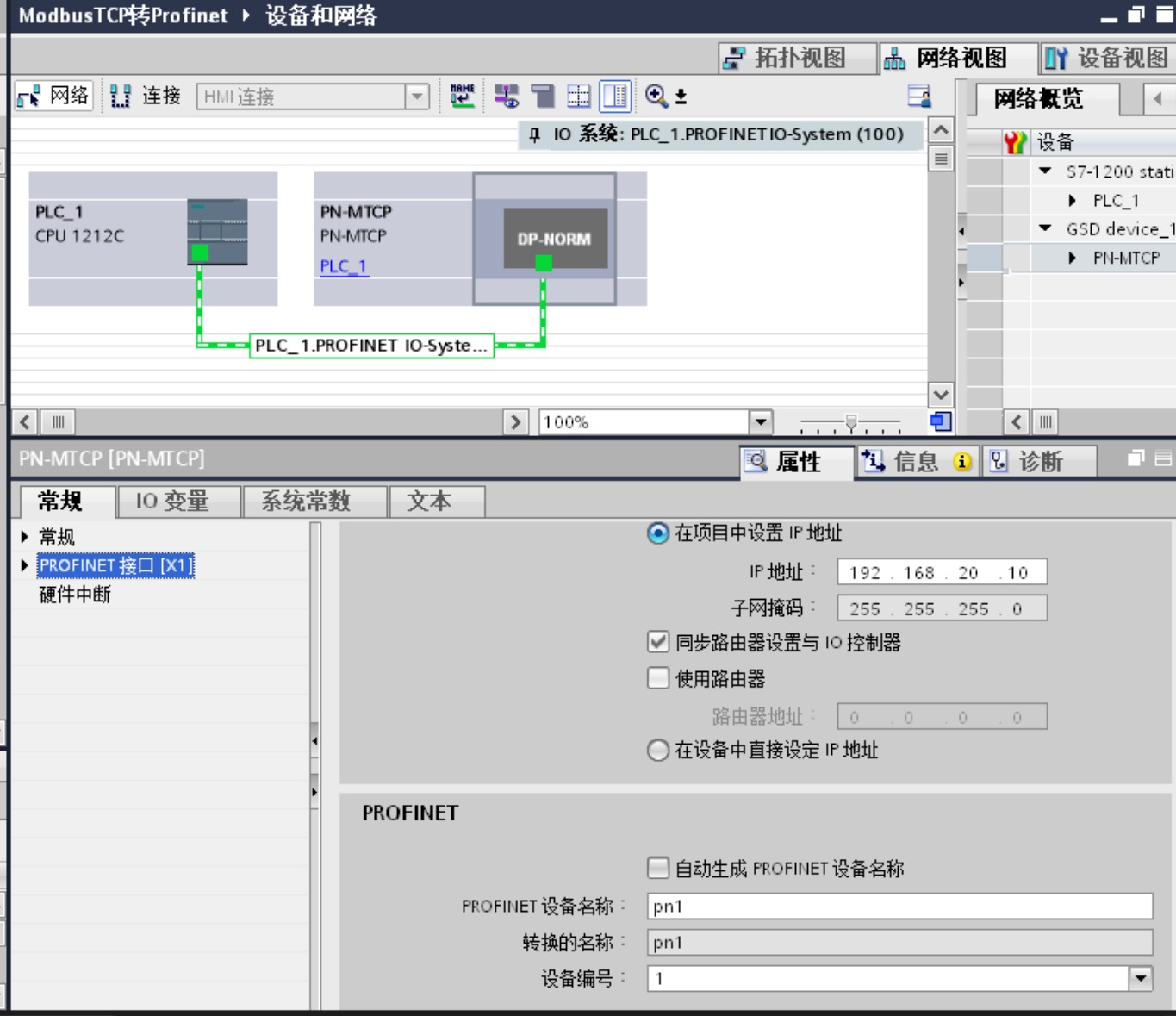
5、设置发送接收数据长度(可添加更大长度);
6、下载组态到PLC,设置好机器人的IP地址,打开网关配置软件,因为Profinet转Modbus TCP网关作为ModbusTCP客户端,所以选择PN2MTC;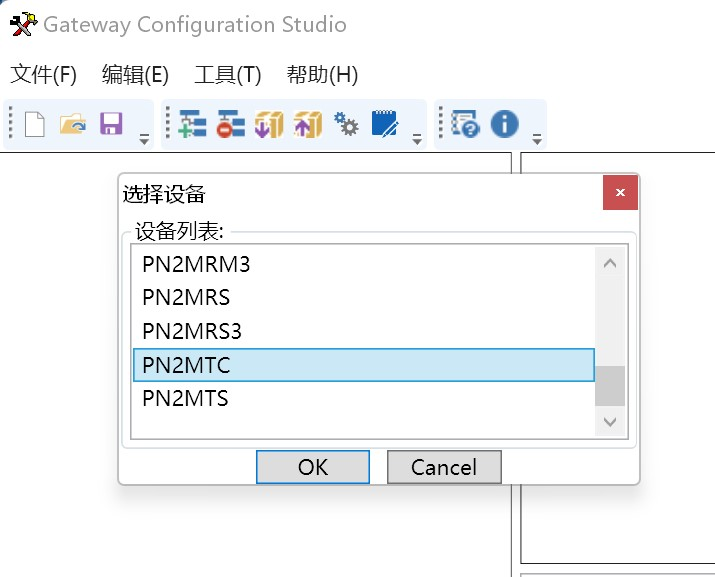
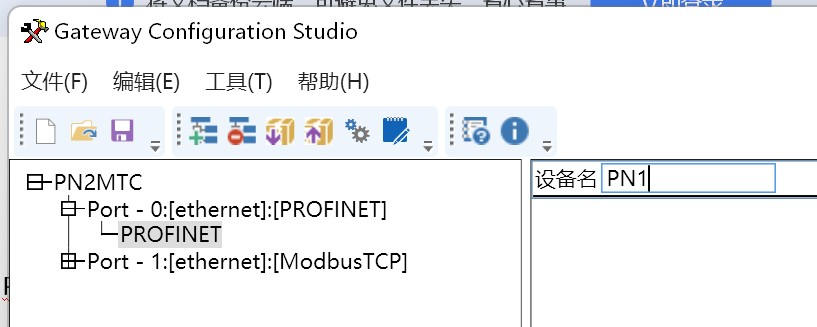
7、设置Profinet转Modbus TCP网关Profinet端的IP地址及设备名称(和博图组态保持一致);

8、设置Profinet转Modbus TCP网关在ModbusTCP端的IP地址;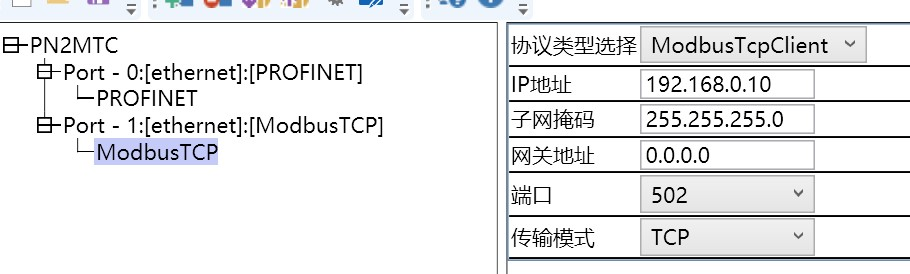
9、添加从站设备的IP地址;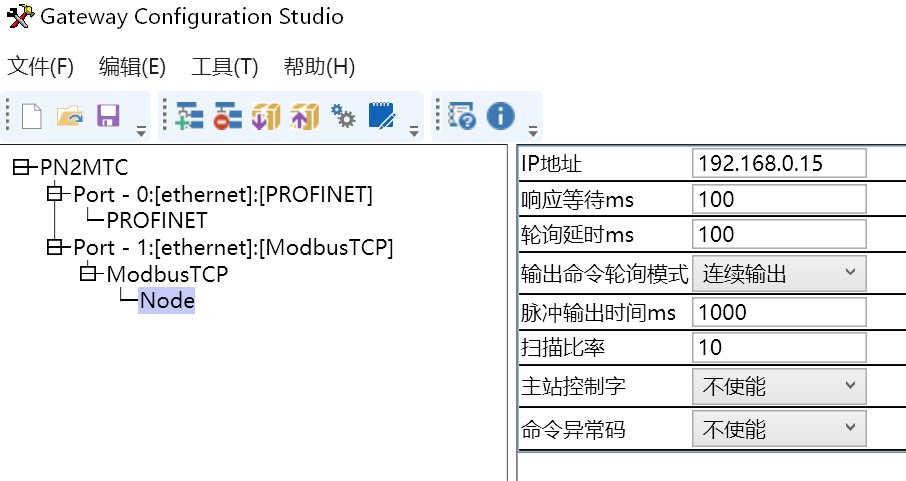
10、打开从站的地址手册,设置Profinet转Modbus TCP网关的读写地址;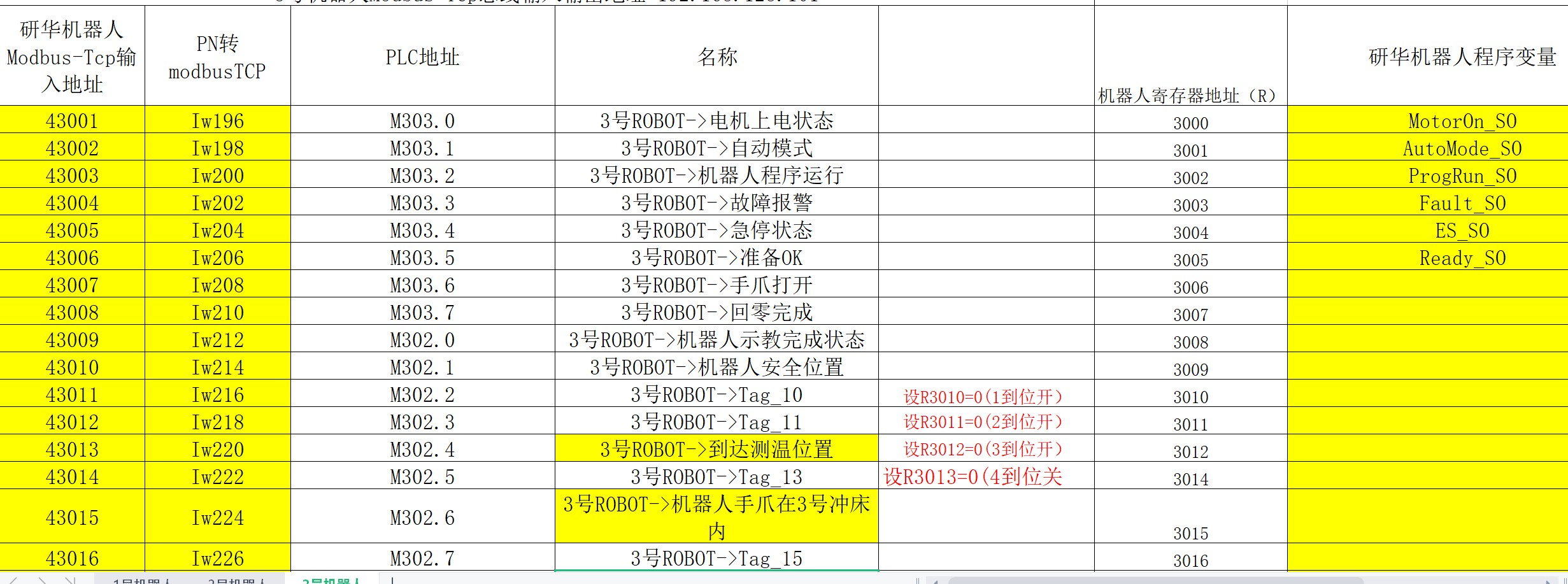
11、从图中可知,参数地址区为40000,所以使用功能码为03功能码,寄存器地址从3000开始(因为机器人地址是从1开始,而网关地址是从0开始。所以要进行地址偏移-1的操作),选择03功能码都保持寄存器;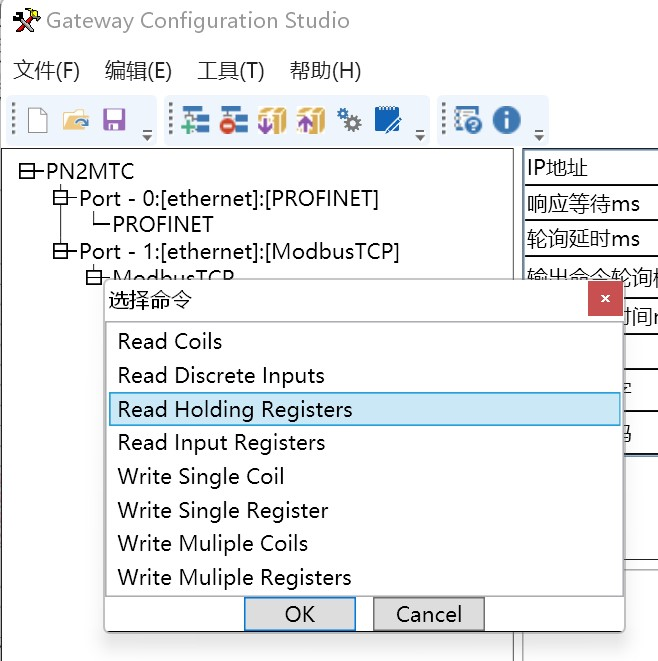
12、填写寄存器地址及读取寄存器个数,如上图所示地址从3000开始连续17个寄存器的数据(03功能码代表40000地址区,故不用写43000);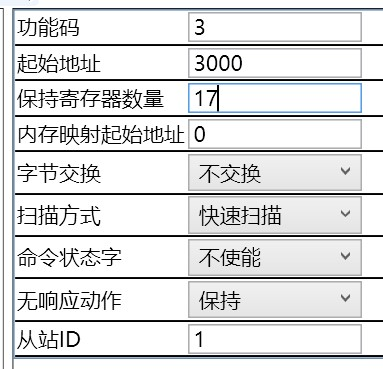
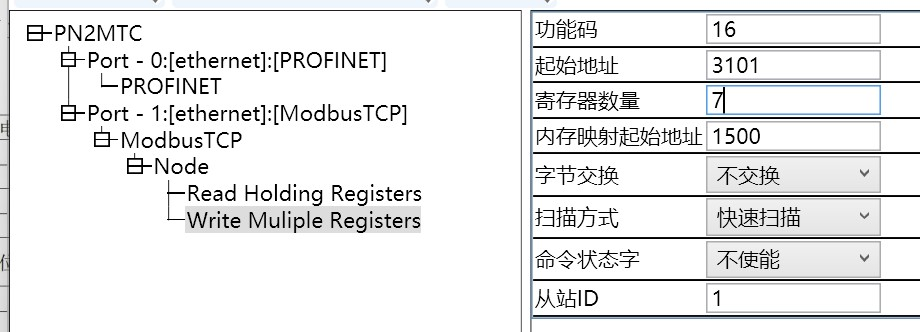
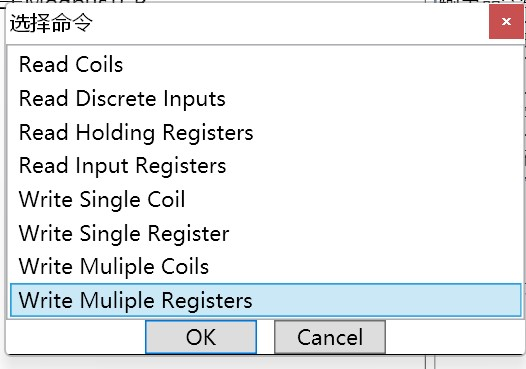
13、写寄存器同理,写多个寄存器需使用10功能码即写多寄存器。地址从换算后的3101开始的连续7个寄存器;
14、选择10H功能码,填写寄存器地址及数量,下载配置到网关后重新上电即可使用。
 电 话:15313135008(微信同号)/15001220257(微信同号)
电 话:15313135008(微信同号)/15001220257(微信同号) Email: 15313135008@163.com
Email: 15313135008@163.com 地 址:北京市丰台区造甲街110号31幢
地 址:北京市丰台区造甲街110号31幢